GeoScenario Architecture
Elements Overview
Elements with a role (i.e., with a gs key tag) are the main components of a GeoScenario. The following table shows a summary of all components supported in the latest version. Note that a component can be created with more than one element type (node, way or closed-way). The icons are not part of the language, but are used in this document as a reference to the GeoScenario Editor (custom JOSM)). Each component will be detailed in the next sections.
| Icon | GS Key | Type | Properties | Description |
|---|---|---|---|---|
| globalconfig | node | unique, mandatory | Global configuration for a scenario. Defines a name for a scenario, the road network, and global failure conditions. | |
| origin | node | unique, optional | Reference point in space (0,0) to align coordinates with different layers in simulation. | |
| metric | node | multiple, optional | Metric. Defines a metric that needs to be tracked during the scenario. | |
| egostart | node | unique, mandatory | The Ego starting position at the beginning of a scenario. | |
| egogoal | node | multiple, mandatory | Goal position for Ego. Reaching this point is the standard success criterion for a scenario (alternative criteria is also possible using triggers). Optionally, can be defined as multiple points to be reached in sequence. | |
| staticobject | node, way, closed-way | multiple, optional | Static Objects used to define obstacles blocking the drivable surface or impairing sensor detection. | |
| vehicle | node | multiple, optional | Vehicles as Traffic Agents that can move during a scenario. Includes vehicles from all sizes and types (car, bicycle, truck, bus, etc) | |
| pedestrian | node | multiple, optional | Pedestrians as Traffic Agents that can move during a scenario. | |
| path | way | multiple, optional | Paths describing trajectories for both Pedestrians and Vehicles. | |
| location | node, way, closed-way | multiple, optional | Named location, used as a reference point for other elements within a scenario. For example, an area where a pedestrian will be placed. | |
| trigger | node | multiple, optional | Trigger used to orchestrate a scenario with actions for dynamic elements. A trigger can be executed by reaching its location, after a given time, or when a condition is true. | |
| trafficlight | node | multiple, optional | Traffic light states (the physical traffic light is defined as a stationary element and is part of the road network) |
The figure shows a meta-model of our main GeoScenario components in a Class Diagram notation from UML.
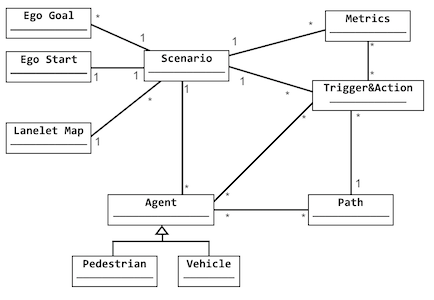
In the next sections we will describe how all those elements work and interact. A table with attributes for each element will be provided. The following symbols will be used:
[l] // support lists
[r] // support range
[d] // support distributions
* // mandatory attribute (all other are assumed to be optional)
(x) // unit of measurement. If not provided, it follows GeoScenario standard units.